
Candlewick: a modern, cross-platform real-time renderer for robotics based on SDL3
- Warning
- Candlewick is still under active development. Support will be limited, and the API might break unexpectedly and repeatedly.
Candlewick is a cross-platform framework for real-time visualization in robotics, based on SDL3's graphics API.
Features
Graphical features
- Shadow mapping using directional shadow maps
- Screen-space ambient occlusion (SSAO)
- WIP: Screen-space shadows (SSS)
Interactivitity
- Integration with ImGui
- Take screenshots of the main window
- (optional) Record videos from the main window using FFmpeg
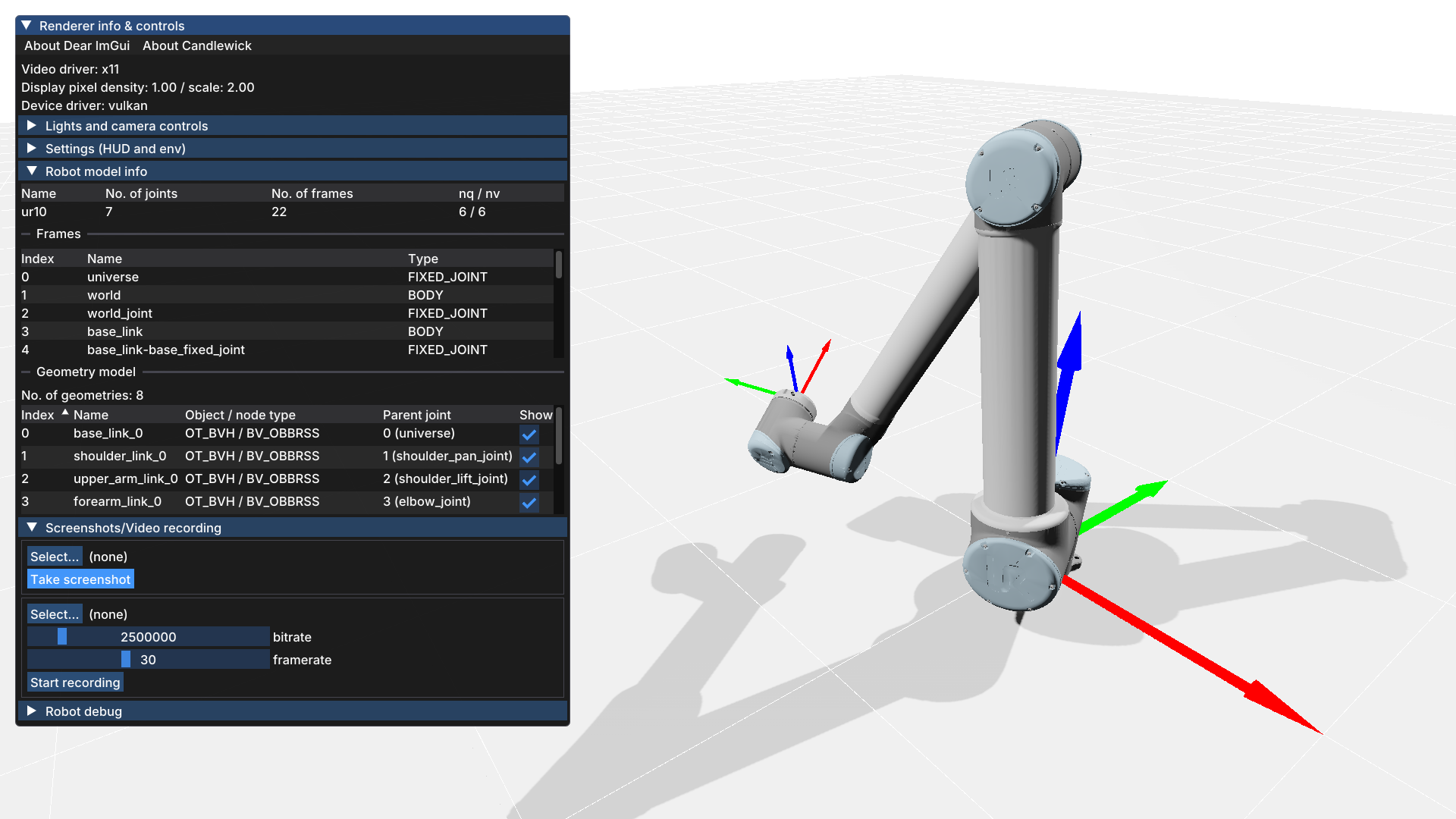
Pinocchio visualizer
Candlewick visualization utilities for robotics based on Pinocchio.
You can load a Pinocchio model, its geometry model, and create a visualizer that can be used similar to the other visualizers included in pinocchio.visualize. Here's a Python example:
Candlewick visualizer runtime and client
The runtime allows users to persist a visualizer window and keep interacting with it asynchronously, even when display commands are not being submitted.
To build the runtime, users must set the BUILD_VISUALIZER_RUNTIME CMake option.
Launch the candlewick runtime:
The corresponding asynchronous visualizer client is used as follows:
Check out the corresponding example.
Dependencies
Core dependencies
Candlewick depends mainly on:
- SDL3 - Graphics backend, windowing, user input
- Assimp - Loading meshes and importing 3D assets
- EnTT - Implementing the Entity-Component System
- nlohmann_json - JSON parsing (used internally for shader reflection)
- Eigen - Linear algebra
- Coal - Collision detection, geometry primitives
- magic_enum - Enum reflection utilities
- spdlog - Logging
These dependencies can be installed from Conda as follows:
Additionally, candlewick depends on the following bundled dependencies:
- ImGui - immediate-mode GUI
Optional dependencies
Python bindings
- eigenpy for Python bindings.
Python runtime dependencies: numpy
Pinocchio support
Required for the candlewick::multibody classes and functions:
- Pinocchio, must be built with collision support.
conda install -c conda-forge pinocchio
Python runtime dependencies: pinocchio (Python bindings)
Additional dependencies for the candlewick-visualizer runtime:
- cppzmq - C++ ZeroMQ bindings
- msgpack-cxx - MessagePack serialization
Python runtime dependencies: pyzmq msgspec
Video recording
- FFmpeg for support for recording videos from the rendered graphics. |
conda install ffmpeg pkg-config| The following components are required:libavformat- Container format handlinglibavcodec- Video encoding/decodinglibswscale- Image scaling and format conversion
Development dependencies (tests, examples)
- GoogleTest for the tests |
conda install gtest - CLI11 for the examples and tests |
conda install cli11 - With Pinocchio support: building the C++ examples requires example-robot-data.
conda install -c conda-forge example-robot-data
Building Candlewick
For building the library, you will need CMake (version at least 3.26) and a C++20-compliant compiler. These can also be obtained through Conda.
In the directory where you have checked out the code, perform the following steps:
A summary of build options
| Build Option | Default | Description | Additional Dependencies | Requires |
|---|---|---|---|---|
BUILD_PYTHON_INTERFACE | ON | Build Python bindings | eigenpy | - |
BUILD_PINOCCHIO_VISUALIZER | ON | Enable Pinocchio robot visualization | pinocchio >= 3.5 | - |
BUILD_VISUALIZER_RUNTIME | OFF | Build candlewick-visualizer executable | cppzmq, msgpack-cxx | BUILD_PINOCCHIO_VISUALIZER=ON |
BUILD_WITH_FFMPEG_SUPPORT | OFF | Enable video recording capabilities | FFmpeg | - |
GENERATE_PYTHON_STUBS | OFF | Generate Python type stubs | (handled by cmake submodule) | BUILD_PYTHON_INTERFACE=ON |
Credits
Many of the design choices of this library are heavily inspired by other, more mature work in the open-source 3D graphics middleware space.
Here are some of the resources I've looked at:
- the Magnum graphics middleware (the design ideas around mesh layouts, how to load geometry primitives, and the type-erased
MeshDatatype) - bgfx
- Sascha Willems' Vulkan examples: https://github.com/SaschaWillems/Vulkan/
Font Credit/License
Candlewick embeds the Inter Medium font as part of its source code:
Inter-Medium.ttf, by Rasmus Andersson.
SIL OPEN FONT LICENSE Version 1.1
Copyright (c) 2016 The Inter Project Authors
https://rsms.me/inter